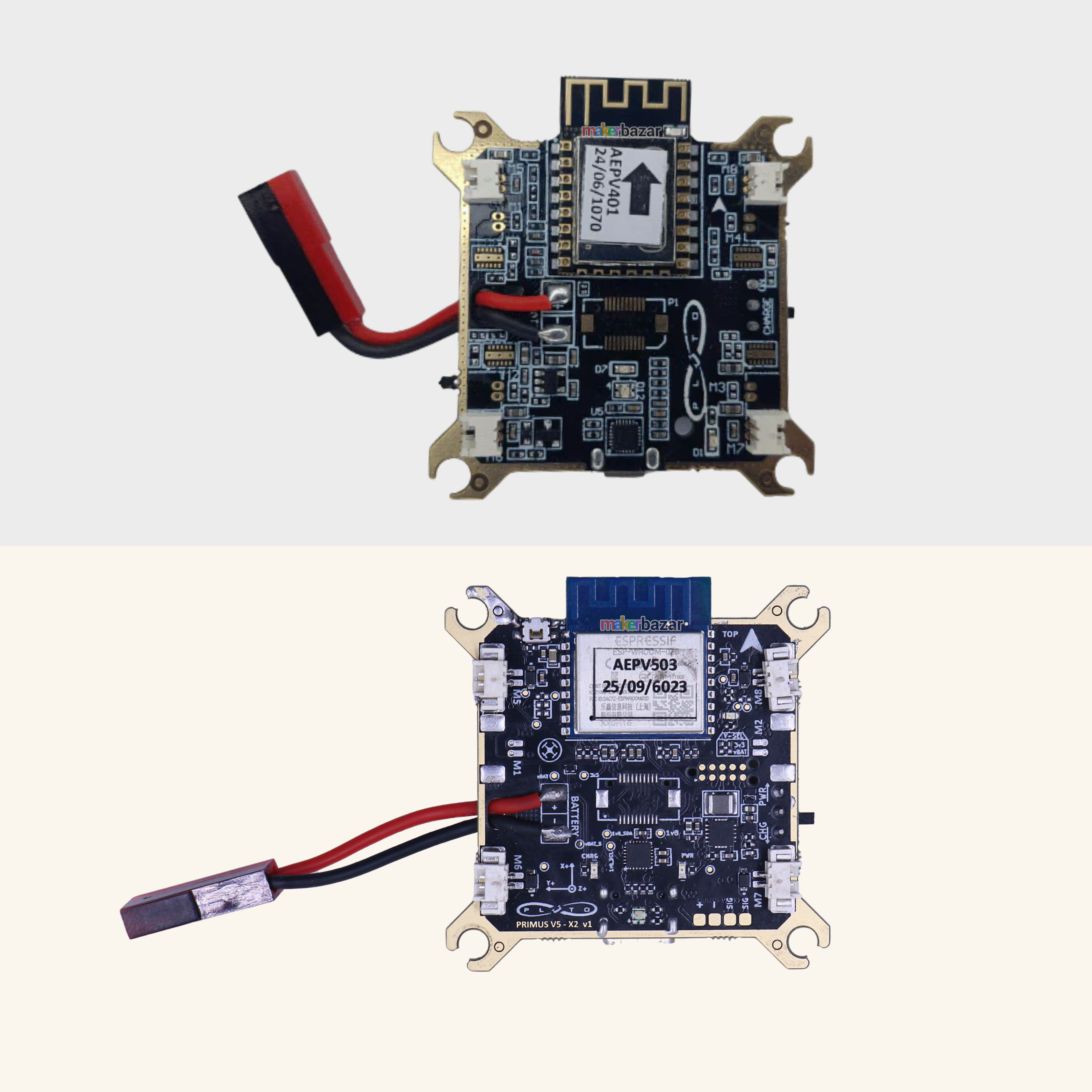
The Pluto Primus Flight Controller is a compact and powerful flight control board designed specifically for the Pluto drone platform. Available in Primus V5 and Primus V4 variants, this controller integrates high-precision sensors, onboard WiFi, motor drivers, and power management to deliver stable and reliable flight performance.
Primus V5 is the latest upgraded version featuring refined hardware, improved connectivity, and enhanced sensor integration. Both variants support modular hardware expansion and seamless programming using the Pluto ecosystem, making them ideal for learning, experimentation, and advanced drone development.
Key Features
ARM Cortex M4 based flight controller
Integrated IMU barometer and power sensing
Onboard WiFi with access point and station mode
Built in motor drivers for quadcopter control
Compact lightweight PCB design
Supports camera and RC input
OTA firmware update support
Designed specifically for Pluto drone platform
Stable and reliable flight performance
Technical Specifications:- Primus V5
| Parameter |
Details |
| Microcontroller |
STM32F303CB ARM Cortex M4 |
| Clock Frequency |
72 MHz |
| Flash Memory |
128 KB |
| Sensors |
INA219 voltage and current sensor, ICM20948 9 axis IMU, ICP10111 barometer |
| Input Voltage |
2.8 V to 5.5 V |
| Logic Level |
3.3 V |
| Battery Charger |
1S LiPo 0.9 A to 1 A |
| Motor Driver |
4 N channel MOSFET up to 6 A |
| WiFi |
Access point mode and station mode |
| Ports |
Camera, PPM RC IN, ADC, PWM, GPIO |
| Dimensions |
48 mm x 48 mm |
| Mounting Hole Diameter |
3.6 mm |
| Weight |
10.4 g |
| Programming |
AeroFlash OTA, USB DFU |
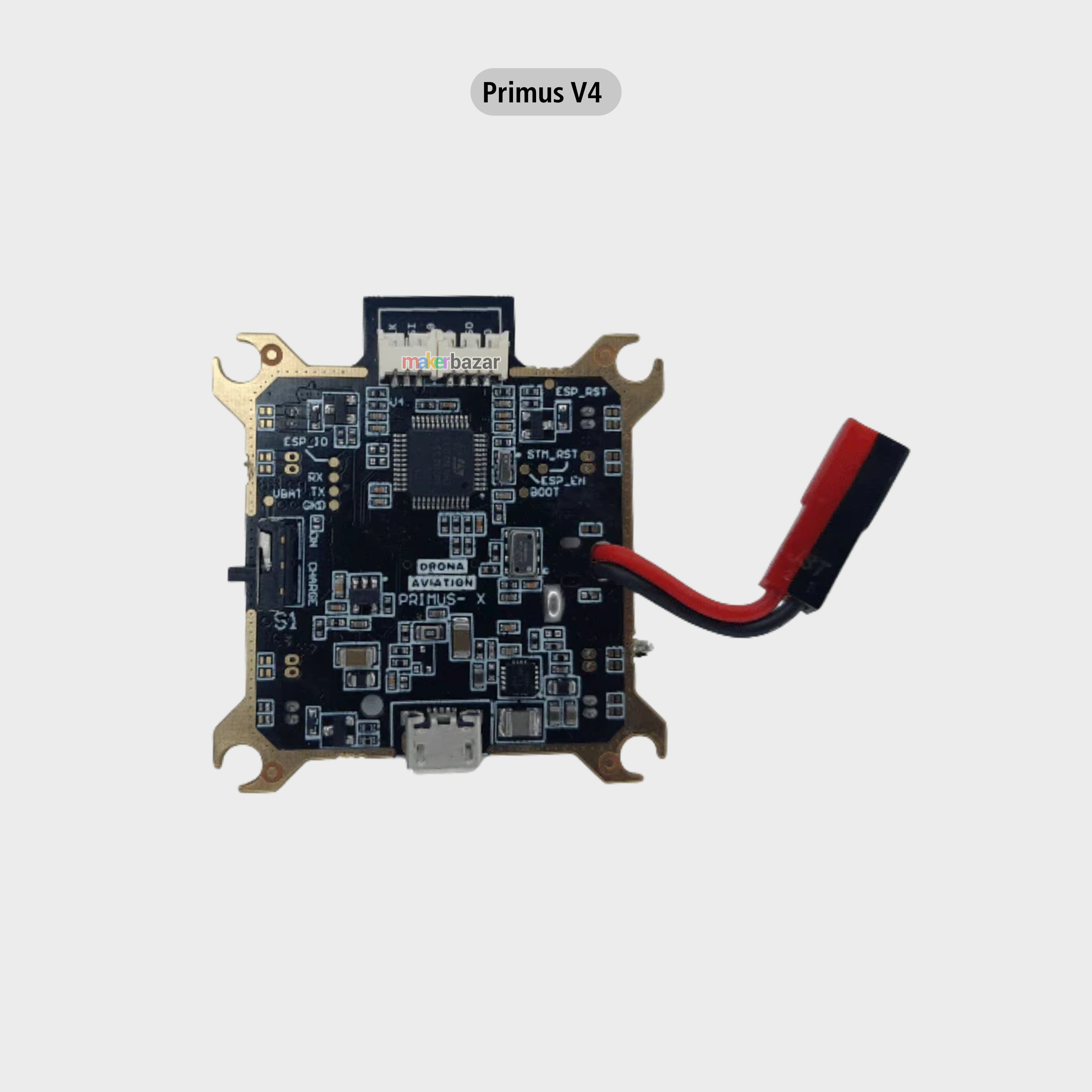
Technical Specifications – Primus V4
| Parameter |
Details |
| Microcontroller |
STM32F303CB ARM Cortex M4 |
| Clock Frequency |
72 MHz |
| Flash Memory |
128 KB |
| Sensors |
MPU9250 accelerometer, gyroscope, magnetometer, MS5611 barometer |
| Input Voltage |
2.8 V to 5.5 V |
| Logic Level |
3.37 V |
| Battery Charging |
1S LiPo up to 500 mA |
| Motor Driver |
4 N channel FETs 3 A per channel |
| WiFi |
Access point mode and station mode |
| Firmware |
Pluto 1.2 standard firmware |
Applications
Educational drone learning platforms
DIY quadcopter projects
Robotics and automation research
Embedded flight control development
STEM training and workshops
Autonomous aerial experiments
Precautions
Verify all connections before powering the board
Use only supported voltage range
Ensure correct polarity when connecting battery
Keep the drone on a flat surface during calibration
Do not short motor or power pins
Use ESD precautions while handling