











Description
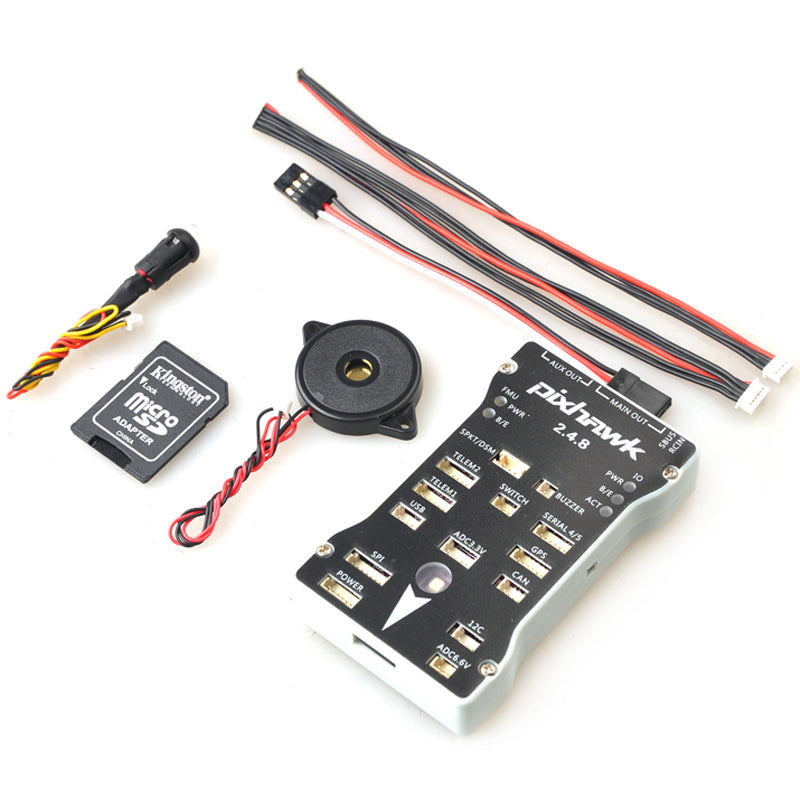
Pix hawk 2.4.8 (PX4 2.4.8) 32Bits Flight Controller for Quadcopter Multicopter
Picking the right flight controller that suits your needs is always a daunting task… Don’t worry we robu.in is here to assist you to get a quality product. Buy this Pixhawk 2.4.8 32 Bit PX4 Autopilot flight controller for your drone application. what are you have to do is just check it’s a specification.
The most common question asked by our community is “what is flight controller” and the answer is here The flight controller (aka FC) is the brain of the Drone(Quadcopter). It’s a circuit board with a range of sensors that detect movement of the drone, as well as user commands so Pixhawk 2.4.8 does. Using this data, it then controls the speed of the motors to make the craft move as instructed.
It Supports 8 RC channel with 4 serial port. Various user interfaces are available for programing, reviewing logs, even some apps for smartphones & tablets. It detects and configures all its peripherals automatically

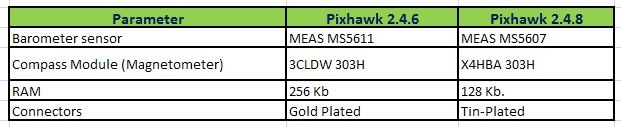
Difference between Pixhawk 2.4.8 & 2.4.6:
Features of Pixhawk 2.4.8:
- The advanced 32-bit ARM CortexM4 high-performance processors; can run NuttX RTOS real-time operating system.
- 14 PWM / servo output.
- Bus interface (UART, I2C, SPI, CAN).
- The integrated backup power and backup controller fails; the primary controller fails over to the backup control is safe.
- Provide automatic and manual modes.
- Provide redundant power input and failover.
- Multicolor LED lights.
- Provide a multi-tone buzzer Interface.
- Micro SD card to record flight data.
Specifications:
Processor:
-
32bit STM32F427 Cortex M4 core with FPU.
-
32-bit STM32F103 failsafe co-processor.
-
168 MHz.
-
128 KB RAM.
-
2 MB Flash.
Sensors:
-
ST Micro L3GD20H 16 bit gyroscope.
-
ST Micro X4HBA 303H 14-bit accelerometer/magnetometer.
-
Invensense MPU 6000 3-axis accelerometer/gyroscope.
-
MEAS MS5607 barometer.
Interfaces:
-
5x UART (serial ports), one high-power capable, 2x with HW flow control.
-
2x CAN (one with an internal 3.3V transceiver, one on expansion connector).
-
Spektrum DSM / DSM2 / DSM-X® Satellite compatible input.
-
Futaba S.BUS® compatible input and output.
-
PPM sum signal input.
-
RSSI (PWM or voltage) input.
-
I2C.
-
SPI.
-
3.3 and 6.6V ADC inputs.
-
Internal micro USB port and external micro USB port extension.
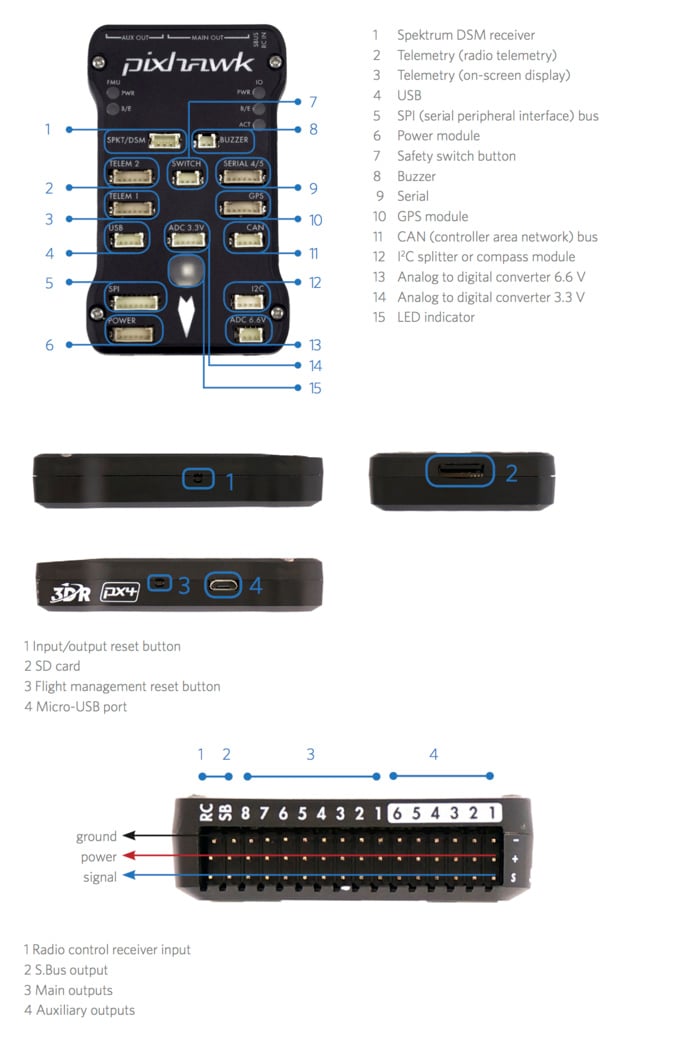
Pixhawk Pinout Connections Ports :